



Im starting a thread there just now as i have a lot of ideas and i dont want to start new threads for all of them.
this is the only photo I have of what I bought, it should be here soon

for controlling it all I'm probably going to use a modified version of my ESP32 boat controller with sub functions added on.
I have been mainly trying to work out depth control systems, most of which I have posted before.
the first one will be a pressure sensor, i found this automotive one that had a thread so i should be able to just port it to the outside to get readings.
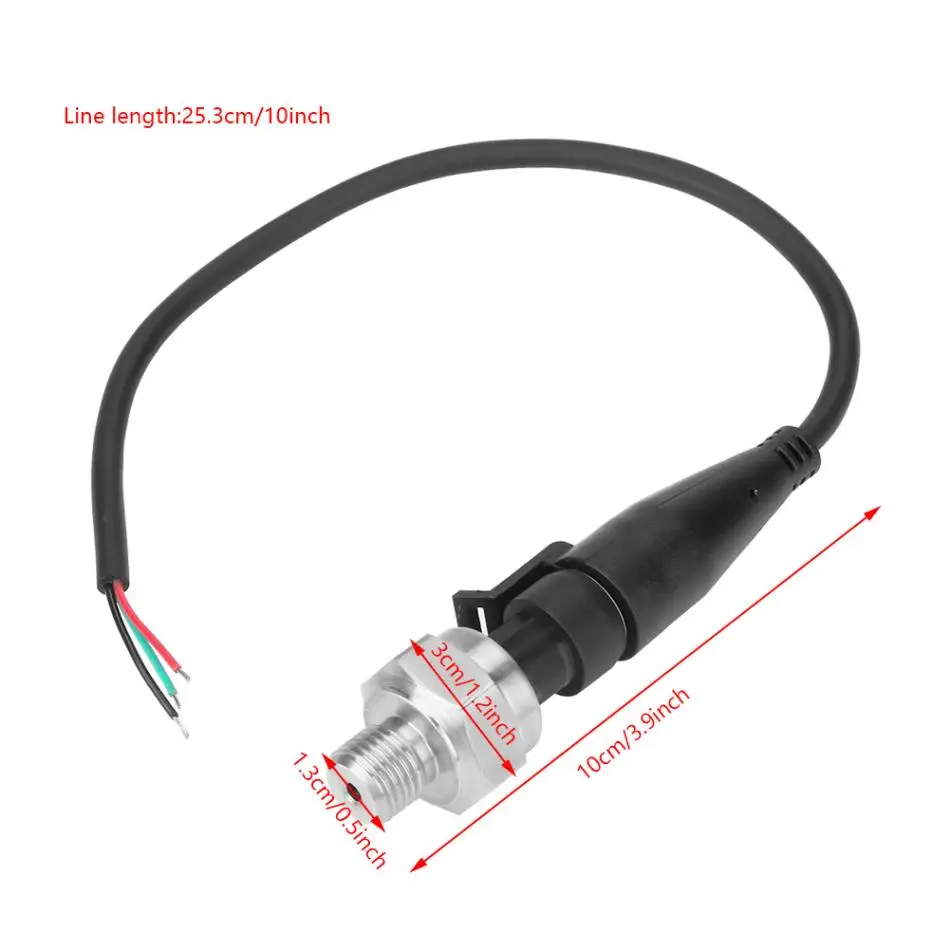
https://www.aliexpress.com/item/32986724606.html
The second depth system will be a sonar or 2, the first will be a dual transducer version for depth, and im probably going to install another single one in the nose to stop me crashing into anything. I want to eventually put fpv on it and visibility is almost nonextent at the best of times so having something to give me warning of a collision is probably a good idea.. The single transducer has a minimum range of 1.5m so its not ideal for measuring shallow water but the dual transducer will go down to 15cm.

https://www.theassociationofmodelsubmariners.com/t1980-jsn-sr04t-depth-sounder
https://www.aliexpress.com/item/1005001594028046.html
https://www.aliexpress.com/item/1005003199461771.html
Third will be a conductivity probe disguised as a conning tower, this gives an analogue output based on how deep it is and how salty the water is, but it should allow it to just skim the surface to keep the video antenna above the water.

https://www.aliexpress.com/item/1005002748929090.html
And finally il be using the radio RSSI as a depth controller so that rather than it coming up once it fail-safes it should start coming back up before that happens and in theory it should run right at the edge of its range without hitting failsafe.
For leveling and heading hold I will be using a SparkFun 9DoF IMU ICM-20948 board, these are a vast improvement over the older MPU6050 and 9250 boards as it has its own onboard data processor that handles all the calculations and it will just spit out the values you need rather than raw data making integration a lot simpler since you dont need to worry about loop times or interupts messing with its calculations, you just retrieve the latest data from it.
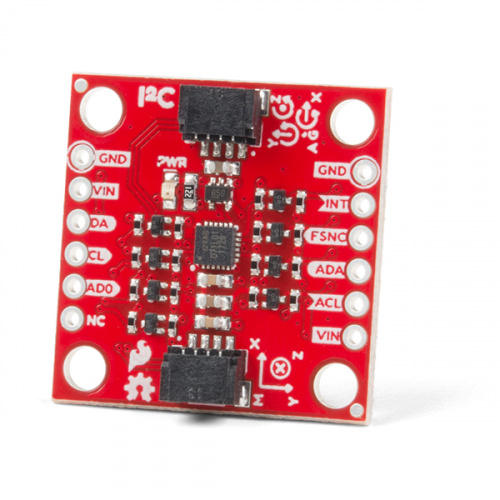
https://learn.sparkfun.com/tutorials/sparkfun-9dof-imu-icm-20948-breakout-hookup-guide/all
for the diving system I have been looking at blood pressure collars , they look much more durable than the drip bags or balloons I have seen people use

https://www.aliexpress.com/item/1005002130699623.html
Based on recommendations I will probably go for a high capacity peristaltic pump and overvolt it to get higher performance, I will be running it from an esc so if i run it at low power for regular operation and just keep max power for emergences it should be ok.

https://www.aliexpress.com/item/32817707131.html
for propulsion im going to convert it to brushless, that video of the seawolf up out the water was too interesting for me not to try it, I belive its running something like a 500kv 3548 outrunner.
https://www.youtube.com/watch?v=GKUx1pkcV8I
Ihave ordered this 750kv motor and 60 ESC
https://www.aliexpress.com/item/1005001394664677.html
https://www.aliexpress.com/item/32769780620.html
for auxiliary propulsion im going to install a bow thruster and possibly a stern thruster if I have space and buoyancy for them, I have seen a photo of them installed in a sub and it was reported back to me that it worked really well.

https://www.theassociationofmodelsubmariners.com/t1979-water-jet-manouvering-thusters
As for a radio system , I have a 1w openlrs 458 system, frsky 868 1w sitting around, Im not sure what one il use for now.
For the video system, its not going to be deep diving, il have to keep a relatively long antenna on it above the surface as 5.8ghz will go nowhere underwater, so its just going to be used for running at periscope depth.
has anyone any other thoughts or ideas or anything im missing.? let me know" />
this is the only photo I have of what I bought, it should be here soon

for controlling it all I'm probably going to use a modified version of my ESP32 boat controller with sub functions added on.
I have been mainly trying to work out depth control systems, most of which I have posted before.
the first one will be a pressure sensor, i found this automotive one that had a thread so i should be able to just port it to the outside to get readings.
https://www.aliexpress.com/item/32986724606.html
The second depth system will be a sonar or 2, the first will be a dual transducer version for depth, and im probably going to install another single one in the nose to stop me crashing into anything. I want to eventually put fpv on it and visibility is almost nonextent at the best of times so having something to give me warning of a collision is probably a good idea.. The single transducer has a minimum range of 1.5m so its not ideal for measuring shallow water but the dual transducer will go down to 15cm.
https://www.theassociationofmodelsubmariners.com/t1980-jsn-sr04t-depth-sounder
https://www.aliexpress.com/item/1005001594028046.html
https://www.aliexpress.com/item/1005003199461771.html
Third will be a conductivity probe disguised as a conning tower, this gives an analogue output based on how deep it is and how salty the water is, but it should allow it to just skim the surface to keep the video antenna above the water.
https://www.aliexpress.com/item/1005002748929090.html
And finally il be using the radio RSSI as a depth controller so that rather than it coming up once it fail-safes it should start coming back up before that happens and in theory it should run right at the edge of its range without hitting failsafe.
For leveling and heading hold I will be using a SparkFun 9DoF IMU ICM-20948 board, these are a vast improvement over the older MPU6050 and 9250 boards as it has its own onboard data processor that handles all the calculations and it will just spit out the values you need rather than raw data making integration a lot simpler since you dont need to worry about loop times or interupts messing with its calculations, you just retrieve the latest data from it.
https://learn.sparkfun.com/tutorials/sparkfun-9dof-imu-icm-20948-breakout-hookup-guide/all
for the diving system I have been looking at blood pressure collars , they look much more durable than the drip bags or balloons I have seen people use
https://www.aliexpress.com/item/1005002130699623.html
Based on recommendations I will probably go for a high capacity peristaltic pump and overvolt it to get higher performance, I will be running it from an esc so if i run it at low power for regular operation and just keep max power for emergences it should be ok.
https://www.aliexpress.com/item/32817707131.html
for propulsion im going to convert it to brushless, that video of the seawolf up out the water was too interesting for me not to try it, I belive its running something like a 500kv 3548 outrunner.
https://www.youtube.com/watch?v=GKUx1pkcV8I
Ihave ordered this 750kv motor and 60 ESC
https://www.aliexpress.com/item/1005001394664677.html
https://www.aliexpress.com/item/32769780620.html
for auxiliary propulsion im going to install a bow thruster and possibly a stern thruster if I have space and buoyancy for them, I have seen a photo of them installed in a sub and it was reported back to me that it worked really well.
https://www.theassociationofmodelsubmariners.com/t1979-water-jet-manouvering-thusters
As for a radio system , I have a 1w openlrs 458 system, frsky 868 1w sitting around, Im not sure what one il use for now.
For the video system, its not going to be deep diving, il have to keep a relatively long antenna on it above the surface as 5.8ghz will go nowhere underwater, so its just going to be used for running at periscope depth.
has anyone any other thoughts or ideas or anything im missing.? let me know" />
Last edited by geofrancis on Sat Jul 29, 2023 8:39 pm; edited 2 times in total






















» Futaba -868/915mhz equipment
» Darnell type 21 submarine, need some help
» Robbe Seawolf V2
» bladder bags
» WW2 mini sub build
» Peral Submarine of 1888
» U-Boat R/C?
» Cheap Arduino Auto leveler