



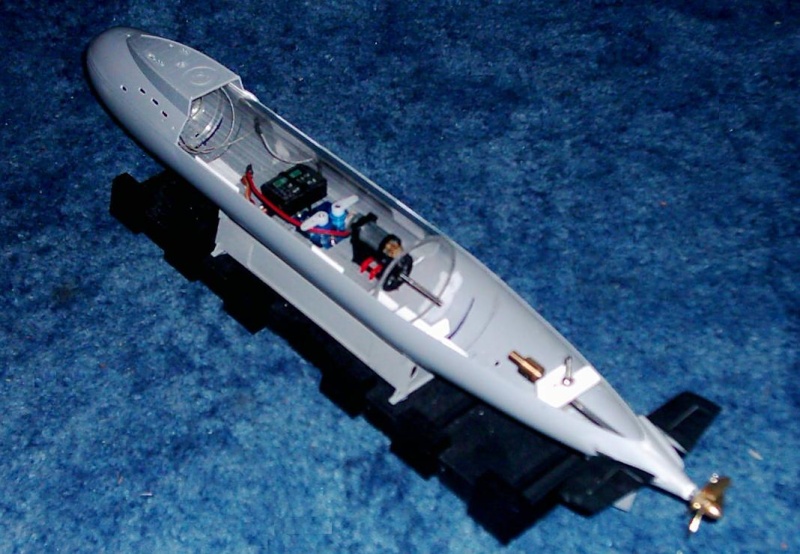
Here's another little project I've been working on for a while now...it's a 1/144th scale Trumpeter Kilo, only 508mm long x 67mm diameter and it's just 127mm from keel to the top of the scope.
It's being built as a dynamic diving boat for the time being, although I may think about converting to a static dive later on.
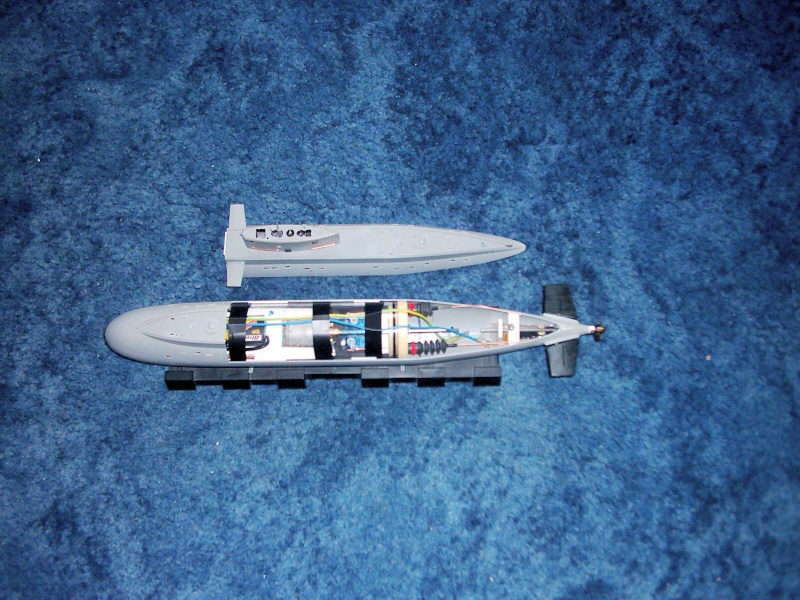
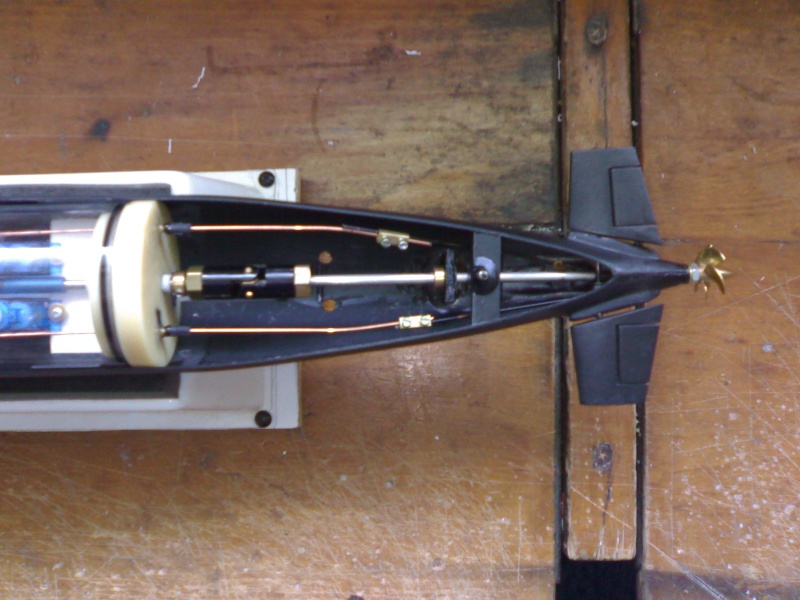
It has a 54mm id (60mm od) cylinder inside it, the rear planes and rudder are operational, although the front planes will be fixed.
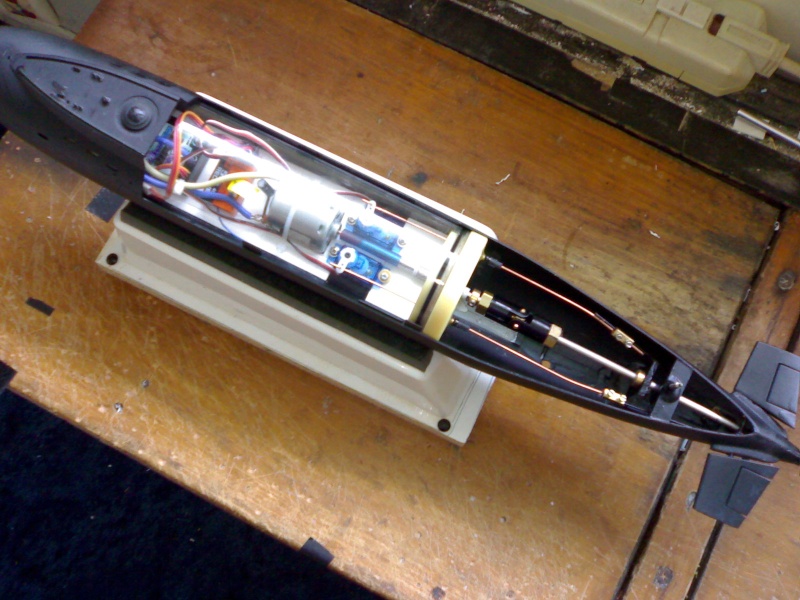
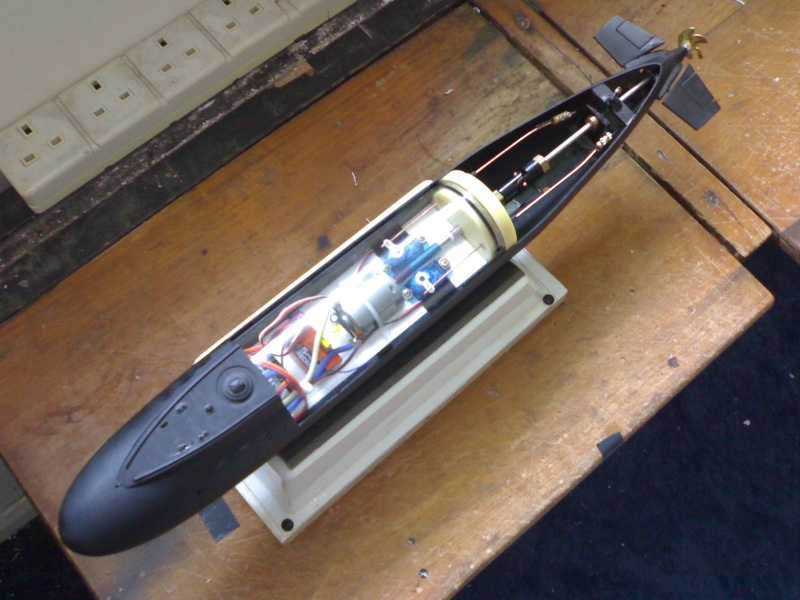
I have two MMB micro servos for it, a 6 volt Park Flyer motor with a gearbox, an Action Electronics Pico esc and a five cell 3600 a/h battery pack.
The prop is a 35mm four bladed brass one, a bit oversized, so I'll be changing that to a five blade 25mm one later on.

It's being built as a dynamic diving boat for the time being, although I may think about converting to a static dive later on.
It has a 54mm id (60mm od) cylinder inside it, the rear planes and rudder are operational, although the front planes will be fixed.
I have two MMB micro servos for it, a 6 volt Park Flyer motor with a gearbox, an Action Electronics Pico esc and a five cell 3600 a/h battery pack.
The prop is a 35mm four bladed brass one, a bit oversized, so I'll be changing that to a five blade 25mm one later on.





















» Futaba -868/915mhz equipment
» Darnell type 21 submarine, need some help
» Robbe Seawolf V2
» bladder bags
» WW2 mini sub build
» Peral Submarine of 1888
» U-Boat R/C?
» Cheap Arduino Auto leveler